OD
达梦数据库
PMP
用户空间驱动
conda
ROBOGUIDE
Impala
多继承和菱形虚拟继承
vue3生命周期
文档管理系统
调试助手
鹈鹕优化算法(POA)
BFC
软件工程师
校园跟腿项目
sbt
rtthread
近邻算法
AVR
排序
ICP算法
2024/4/11 20:37:55
Generalized-ICP(GICP)論文研讀
Generalized-ICP論文研讀前言損失函數推導應用point-to-pointpoint-to-planeplane-to-plane前言
ICP最基本的形式是point-to-point,即以點到點之間的距離作為損失函數;它的一個變種是point-to-plane,改用點到目標點局部擬合平面的距離作為損…

点云配准2:icp算法在PCL1.10.0上的实现+源码解析
目录本文最后实现的配准实例点云配准系列准备程序结构主程序1、为什么要降采样2、体素降采样原理3、点云更新icp配准前的参数设置icp配准算法内部对应点对确定(determineCorrespondences)变换矩阵求解estimateRigidTransformation算法是否应该停止判定co…
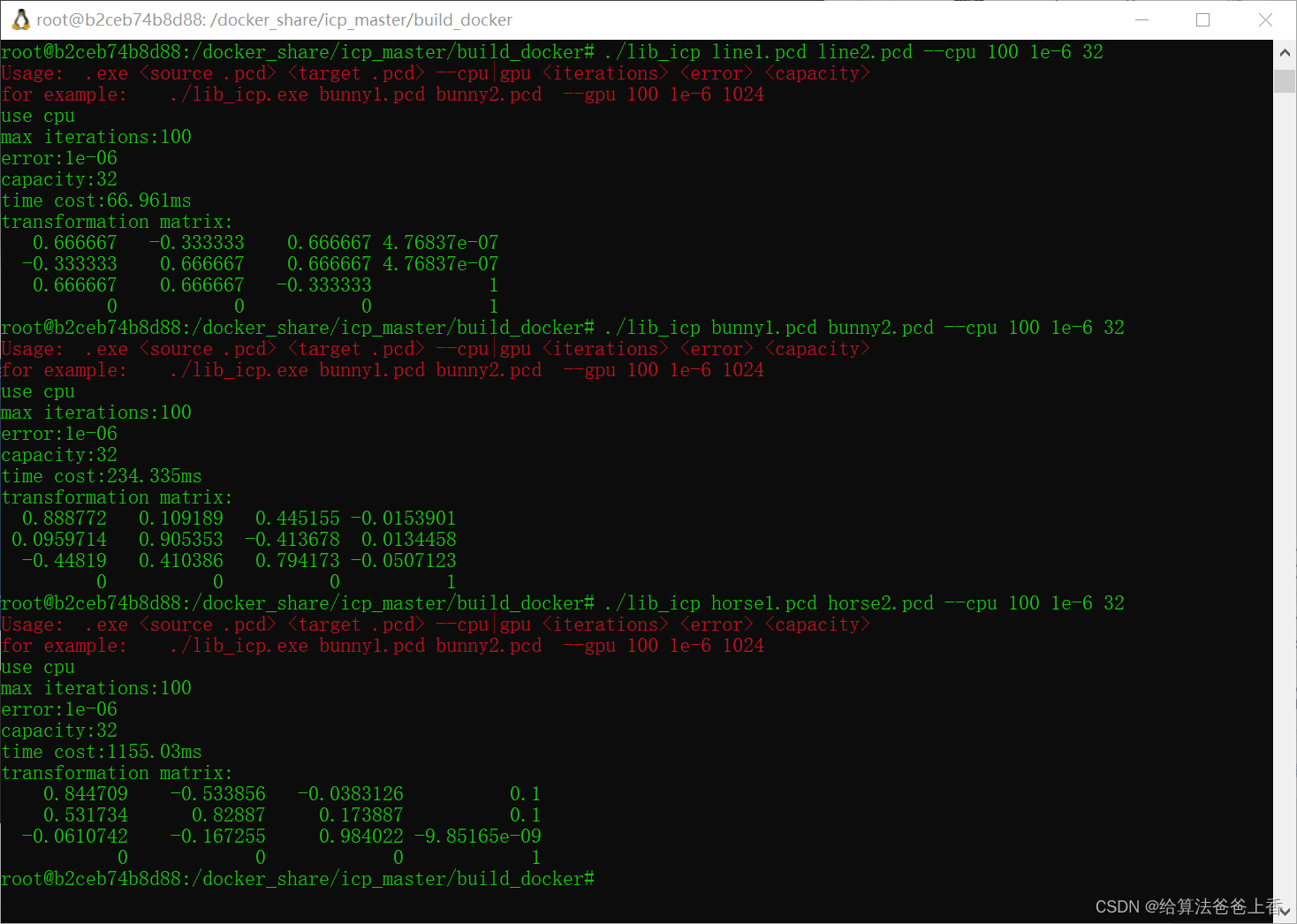
ICP算法加速优化--多线程和GPU
LZ之前的文章ICP算法实现(C) 用C实现了基础的ICP算法,由于该算法是一种迭代的优化算法,里面含有大量循环操作以及矩阵运算,可以通过使用多线程或者GPU硬件来进行加速,具体分别可以通过OpenMP和CUDA编程实现…

点云配准1:配准基础及icp算法
目录点云配准(point set registration)点云配准系列icp算法原理算法优缺点算法原理配准实现参考及感谢papersblogs完点云配准(point set registration)
对于一个目标,诸如激光雷达扫描仪(LIDAR)…

点云配准论文阅读笔记--Comparing ICP variants on real-world data sets
目录写在前面点云配准系列摘要1引言(Introduction)2 相关研究(Related work)3方法( Method)3.1输入数据的敏感性3.2评价指标3.3协议4 模块化的icp(Modular ICP)4.1 处理单元4.3使用5…
slam 3D-3D ICP (六)
目录 一、介绍ICP(Iterative Closest Point)
二、求解ICP
1、使用线性代数SVD求解
2、线性SVD求解方法总结
2.1、计算两幅图像匹配好的3D点 的质心坐标,然后计算去质心坐标:
2.2、计算旋转矩阵
2.3计算t
2、非线性优化方法 一、介绍IC…

点云配准论文阅读笔记--Efficient Variants of the ICP Algorithm
目录点云配准系列写在前面摘要1 1 Introduction – Taxonomy of ICP Variants引言-icp变体算法的分类2 Comparison Methodology比较方法2.1 Test Scenes用于测试的数据3 Comparisons of ICP Variants icp变体算法的对比3.1 Selection of Points选点(降采样ÿ…